During the last few weeks I was busy exploring
the internal working of Handles under Windows , by disassembling and
decompiling certain kernel (ntoskrnl.exe) functions under my Windows 7
32-bit machine.In the current time I am preparing a paper to describe
and explain what I learned about Handles. But today I’m here to discuss
an interesting function pointer hook that I found while decompiling and
exploring the ObpCloseHandleEntry function. (Source codes below).
A
function pointer hook consists of overwriting a callback function
pointer so when a kernel routine will call the callback function, the
hook function will be called instead . The function pointer that we will
be hooking in this article is the OkayToCloseProcedure callback that exists in the _OBJECT_TYPE_INITIALIZER structure which is an element of the OBJECT_TYPE struct.
Every
object in Windows has an OBJECT_TYPE structure which specifies the
object type name , number of opened handles to this object type ...etc OBJECT_TYPE also stores a type info structure (_OBJECT_TYPE_INITIALIZER) that has a group of callback functions (OpenProcedure ,CloseProcedure…) . All OBJECT_TYPE structures pointers are stored in the unexported ObTypeIndexTable array.
As I said earlier , the OkayToCloseProcedure is called inside ObpCloseHandleEntry
function.In general this function (if the supplied handle is not
protected from being closed) frees the handle table entry , decrements
the object’s handle count and reference count.
Another case when the handle will not be closed is if the OkayToCloseProcedure returned 0 , in this case the ObpCloseHandleTableEntry returns STATUS_HANDLE_NOT_CLOSABLE.
I will discuss handles in more details in my future blog posts.
So how the OkayToCloseProcedure is called ?
ObpCloseHandleTableEntry function actually gets the Object (which the handle is opened to) header (_OBJECT_HEADER). A pointer to the object type structure (_OBJECT_TYPE) is then obtained by accessing the ObTypeIndexTable array using the Object Type Index from the object header (ObTypeIndexTable[ObjectHeader->TypeIndex]).
The function will access the OkayToCloseProcedure field and check if it’s NULL , if that’s true the function will proceed to other checks (check if the handle is protected from being closed). If the OkayToCloseProcedure
field isn’t NULL , the function will proceed to call the callback
function. If the callback function returns 0 the handle cannot be closed
and ObpCloseHandleTableEntry will return STATUS_HANDLE_NOT_CLOSABLE. If it returns a value other than 0 we will proceed to the other checks as it happens when the OkayToCloseProcedure is NULL.
An
additional point is that the OkayToCloseProcedure
must always run within the context of the process that opened the handle
in the first place (a call to KeStackAttachProcess). I don’t think that this would be a problem if ObpCloseHandleTableEntry is called as a result of calling ZwClose from usermode because we’ll be running in the context of the process that opened the handle.However, if ZwClose was called from kernel land and was supplied a kernel handle KeStackAttachProcess will attach the thread to the system process. The reason behind that is that we always want to access the right handle table (each process has a different handle table, and for the kernel we have the system handle table).
So if ObpCloseHandleTableEntry is called from another process context and is trying to close another process’s handle, the OkayToCloseProcedure must run in that process context. That’s why ObpCloseHandleTableEntry takes a pointer to the process object (owner of the handle) as a parameter.
Applying the hook :
Now
after we had a quick overview of what’s happening , let’s try and apply
the hook on the OBJECT_TYPE_INITIALIZER’s OkayToCloseProcedure field.
I applied the hook on the Process object type , we can obtain a pointer to the process object type by taking advantage of the exported PsProcessType , it’s actually a pointer to a pointer to the process’s object type.
Here’s a list containing the exported object types : POBJECT_TYPE *ExEventObjectType; POBJECT_TYPE *ExSemaphoreObjectType; POBJECT_TYPE *IoFileObjectType; POBJECT_TYPE *PsThreadType; POBJECT_TYPE *SeTokenObjectType; POBJECT_TYPE *PsProcessType; POBJECT_TYPE *TmEnlistmentObjectType; POBJECT_TYPE *TmResourceManagerObjectType; POBJECT_TYPE *TmTransactionManagerObjectType; POBJECT_TYPE *TmTransactionObjectType;
A second way to get an object’s type is by getting an existing object’s pointer and then pass it to the exported kernel function ObGetObjectType which will return a pointer to the object’s type.
A third way is to get a pointer to the ObTypeIndexTable array, it’s unexported by the kernel but there are multiple functions using it including the exported ObGetObjectType
function.So the address can be extracted from the function's opcodes ,
but that will introduce another compatibility problem. After getting the
pointer to the ObTypeIndexTable you'll have to walk through the
whole table and preform a string comparison to the target's object type
name ("Process","Thread" ...etc) against the Name field in each _OBJECT_TYPE structure.
In my case I hooked the Process object type , and I introduced in my code the 1st and the 2nd methods (second one commented).
My
hook isn’t executing any malicious code !! it’s just telling us (using
DbgPrint) that an attempt to close an open handle to a process was made.
“An
attempt” means that we’re not sure "yet" if the handle will be closed
or not because other checks are made after a successful call to the
callback.And by a successful call , I mean that the callback must return
a value different than 0 that’s why the hook function is returning 1. I
said earlier that the ObpCloseHandleTableEntry will proceed to check if the handle is protected from being closed (after returning from the callback) if the OkayToCloseProcedure
is null or if it exists and returns 1 , that's why it’s crucial that our
hook returns 1.One more thing , I’ve done a small check to see if the
object type’s OkayToCloseProcedure is already NULL before hooking it (avoiding issues).
Example :
For example when closing a handle to a process opened by OpenProcess a debug message will display the handle value and the process who opened the handle.
As you can see "TestOpenProcess.exe" just closed a handle "0x1c" to a process that it opened using OpenProcess().
Hello,
Lately I decided to start sharing the notes I gather , almost daily , while reverse engineering and studying Windows. As I focused in the last couple of days on studying context switching , I was able to decompile the most involved functions and study them alongside with noting the important stuff. The result of this whole process was a flowchart.
Before getting to the flowchart let's start by putting ourselves in the main plot :
As you might know, each thread runs for a period of time before another thread is scheduled to run, excluding the cases where the thread is preempted ,entering a wait state or terminated. This time period is called a quantum. Everytime a clock interval ends (mostly 15 ms) the system clock issues an interrupt.While dispatching the interrupt, the thread current cycle count is verified against its cycle count target (quantum target) to see if it has reached or exceeded its quantum so the context would be switched the next thread scheduled to run.
Note that a context-switch in Windows doesn't happen only when a thread has exceeded its quantum, it also happens when a thread enters a wait state or when a higher priority thread is ready to run and thus preempts the current thread.
As it will take some time to organize my detailed notes and share them here as an article (maybe for later),consider the previous explanation as a small introduction into the topic. However ,the flowchart goes through the details involved in quantum end context switching.
Please consider downloading the pdf to be able to zoom as much as you
like under your PDF reader because GoogleDocs doesn't provide enough
zooming functionality to read the chart.
P.S : - As always , this article is based is on : Windows 7 32-bit
- Note that details concerning the routine that does the context switching (SwapContext) aren't included in the chart and are left it for a next post.
Here I am really taking advantage of my summer vacations and back again with a second part of the Windows thread scheduling articles. In the previous blog post I discussed the internals of quantum end context switching (a flowchart). However, the routine responsible for context switching itself wasn't discussed in detail and that's why I'm here today.
Here are some notes that'll help us through this post : 1 - The routine which contains code that does context switching is SwapContext and it's called internally by KiSwapContext. There are some routines that prefer to call SwapContext directly and do the housekeeping that KiSwapContext does themselves. 2 - The routines above (KiSwapContext and SwapContext) are implemented in ALL context switches that are performed no matter what is the reason of the context switch (preemption,wait state,termination...). 3 - SwapContext is originally written in assembly and it doesn't have any prologue or epilogue that are normally seen in ordinary conventions, imagine it like a naked function. 4 - Neither SwapContext or KiSwapContext is responsible for setting the CurrentThread and NextThread fields of the current KPRCB. It is the responsibility of the caller to store the new thread's KTHREAD pointer into pPrcb->CurrentThread and queue the current thread (we're still running in its context) in the ready queue before calling KiSwapContext or SwapContext which will actually perform the context-switch.
Usually before calling KiSwapContext, the old irql (before raising it to DISPATCH_LEVEL) is stored in CurrentThread->WaitIrql , but there's an exception discussed later in this article.
So buckle up and let's get started :
Before digging through SwapContext let's first start by examining what its callers supply to it as arguments.
SwapContext expects the following arguments:
- ESI : (PKTHREAD) A pointer to the New Thread's structure.
- EDI : (PKTHREAD) A pointer to the old thread's structure.
- EBX : (PKPCR) A pointer to PCR (Processor control region) structure of the current processor.
- ECX : (KIRQL) The IRQL in which the thread was running before raising it to DISPATCH_LEVEL.
By callers, I mean the KiSwapContext routine and some routines that call SwapContext directly (ex : KiDispatchInterrupt).
Let's start by seeing what's happening inside KiSwapContext :
This routine expects 2 arguments the Current thread and New thread KTHREAD pointers in ECX and EDX respectively (__fastcall).
Before storing both argument in EDI and ESI, It first proceeds to save these and other registers in the current thread's (old thread soon) stack: EBP : The stack frame base pointer (SwapContext only updates ESP). EDI : The caller might be using EDI for something else ,save it. ESI : The caller might be using ESI for something else ,save it too. EBX : The caller might be using EBX for something else ,save it too.
Note that these registers will be popped from this same thread's stack when the context will be switched from another thread to this thread again at a later time (when it will be rescheduled to run).
After pushing the registers, KiSwapContext stores the self pointer to the PCR in EBX (fs:[1Ch]).Then it stores the CurrentThread->WaitIrql value in ECX, now that everything is set up KiSwapContext is ready to call SwapContext.
Again, before going through SwapContext let me talk about routines that actually call SwapContext directly and exactly the KiDispatchInterrupt routine that was referenced in my previous post. Why doesn't KiDispatchInterrupt call KiSwapContext ?
Simply because it just needs to push EBP,EDI and ESI onto the current thread's stack as it already uses EBX as a pointer to PCR.
Here, we can see a really great advantage of software context switching where we just save the registers that we really need to save, not all registers.
Now , we can get to SwapContext and explain what it does in detail.
The return type of SwapContext is a boolean value that tells the caller (in the new thread's stack) whether the new thread has any APCs to deliver or not.
Let's see what SwapContext does in these 15 steps:
1 - The first thing that SwapContext does is verify that the new thread isn't actually running , this is only right when dealing with a multiprocessor system where another processor might be actually running the thread.If the new thread is running SwapContext just loops until the thread stops running. The boolean value checked is NewThread->Running and after getting out of the loop, the Running boolean is immediately set to TRUE.
2 - The next thing SwapContext does is pushing the IRQL value supplied in ECX. To spoil a bit of what's coming in the next steps (step 13) SwapContext itself pops ECX later, but after the context switch. As a result we'll be popping the new thread's pushed IRQL value (stack switched).
3 - Interrupts are disabled, and PRCB cycle time fields are updated with the value of the time-stamp counter. After the update, Interrupts are enabled again.
4 - increment the count of context switches in the PCR (Pcr->ContextSwitches++;) , and push Pcr->Used_ExceptionList which is the first element of PCR (fs:[0]). fs:[0] is actually a pointer to the last registered exception handling frame which contains a pointer to the next frame and also a pointer to the handling routine (similar to usermode), a singly linked list simply. Saving the exception list is important as each thread has its own stack and thus its own exception handling list.
5 - OldThread->NpxState is tested, if it's non-NULL, SwapContext proceeds to saving the floating-points registers and FPU related data using fxsave instruction. The location where this data is saved is in the initial stack,and exactly at (Initial stack pointer - 528 bytes) The fxsave output is 512 bytes long , so it's like pushing 512 bytes onto the initial stack , the other 16 bytes are for stack-alignment I suppose.The Initial stack is discussed later during step 8.
6 - Stack Swapping : Save the stack pointer in OldThread->KernelStack and load NewThread->KernelStack into ESP. We're now running in the new thread's stack, from now on every value that we'll pop was previously pushed the last time when the new thread was preparing for a context-switch.
7 - Virtual Address Space Swapping : The old thread process is compared with the new thread's process if they're different CR3 register (Page directory pointer table register) is updated with the value of : NewThread->ApcState.Process->DirectoryTableBase. As a result, the new thread will have access to a valid virtual address space. If the process is the same, CR3 is kept unchanged. The local descriptor table is also changed if the threads' processes are different.
8 - TSS Esp0 Switching : Even-though I'll dedicate a future post to discuss TSS (task state segment) in detail under Windows , a brief explanation is needed here. Windows only uses one TSS per processor and uses only (another field is also used but it is out of the scope of this article) ESP0 and SS0 fields which stand for the kernel stack pointer and the kernel stack segment respectively. When a usermode to kernelmode transition must be done as a result of an interrupt,exception or system service call... as part of the transition ESP must be changed to point to the kernel stack, this kernel stack pointer is taken from TSS's ESP0 field. Logically speaking, ESP0 field of the TSS must be changed on every context-switch to the kernel stack pointer of the new thread. In order to do so, SwapContext takes the kernel stack pointer at NewThread->InitialStack (InitialStack = StackBase - 0x30) ,it substrats the space that it has used to save the floating-point registers using fxsave instruction and another additional 16 bytes for stack alignment, then it stores the resulted stack pointer in the TSS's Esp0 field : pPcr->TssCopy.Esp0 (TSS can be also accessed using the TR segment register).
9 - We've completed the context-switch now and the old thread can be finally marked as "stopped running" by setting the previously discussed boolean value "Running" to FALSE. OldThread->Running = FALSE.
10 - If fxsave was previously executed by the new thread (the last time its context was switched), the data (floating-point registers...) saved by it is loaded again using xrstor instruction.
11 - Next the TEB (Thread environment block) pointer is updated in the PCR :
pPcr->Used_Self = NewThread->Teb . So the Used_Self field of the PCR points always to the current thread's TEB.
12 - The New thread's context switches count is incremented (NewThread->ContextSwitches++).
13 - It's finally the time to pop the 2 values that SwapContext pushed , the pointer to the exception list and the IRQL from the new thread's stack. the saved IRQL value is restored in ECX and the exception list pointer is popped into its field in the PCR.
14 - A check is done to see if the context-switch was performed from a DPC routine (Entering a wait state for example) which is prohibited. If pPrcb->DpcRoutineActive boolean is TRUE this means that the current processor is currently executing a DPC routine and SwapContext will immediately call KeBugCheck which will show a BSOD : ATTEMPTED_SWITCH_FROM_DPC.
15 - This is the step where the IRQL (NewThread->WaitIrql) value stored in ECX comes to use. As mentionned earlier SwapContext returns a boolean value telling the caller if it has to deliver any pending APCs. During this step SwapContext will check the new thread's ApcState to see if there are any kernel APCs pending. If there are : a second check is performed to see if special kernel APCs are disabled , if they're not disabled ECX is tested to see if it's PASSIVE_LEVEL, if it is above PASSIVE_LEVEL an APC_LEVEL software interrupt is requested and the function returns FALSE. Actually the only case that SwapContext returns TRUE is if ECX is equal to PASSIVE_LEVEL so the caller will proceed to lowering IRQL to APC_LEVEL first to call KiDeliverApc and then lower it to PASSIVE_LEVEL afterwards.
Special Case :
This special case is actually about the IRQL value supplied to SwapContext in ECX. The nature of this value depends on the caller in such way that if the caller will lower the IRQL immediately upon returning from SwapContext or not.
Let's take 2 examples : KiQuantumEnd and KiExitDispatcher routines. (KiQuantumEnd is the special case)
If you disassemble KiExitDispatcher you'll notice that before calling KiSwapContext it stores the OldIrql (before it was raised to DISPATCH_LEVEL) in the WaitIrql of the old thread so when the thread gains execution again at a later time SwapContext will decide whether there any APCs to deliver or not. KiExitDispatcher makes use of the return value of KiSwapContext (KiSwapContext returns the same value returned by SwapContext) to lower the IRQL. (see step 15 last sentence).
However, by disassembling KiQuantumEnd you'll see that it's storing APC_LEVEL at the old thread's WaitIrql without even caring about in which IRQL the thread was running before. If you refer back to my flowchart in the previous article you'll see that KiQuantumEnd always insures that SwapContext returns FALSE , first of all because KiQuantumEnd was called as a result of calling KiDispatchInterrupt which is meant to be called when a DISPATCH_LEVEL software interrupt was requested.Thus, KiDispatchInterrupt was called by HalpDispatchSoftwareInterrupt which is normally called by HalpCheckForSoftwareInterrupt. HalpDispatchSoftwareInterrupt is the function responsible for raising the IRQL to the software interrupt level (APC_LEVEL or DISPATCH_LEVEL) and upon returning from it HalpCheckForSoftwareInterrupt recovers back the IRQL to its original value (OldIrql). So the reason why KiQuantumEnd doesn't care about KiSwapContext return value because it won't proceed to lowering the IRQL (not its responsibility) nor to deliver any APCs that's why it's supplying APC_LEVEL as an old IRQL value to SwapContext so that it will return FALSE. However, a software interrupt might be requested by SwapContext if there are any pending APCs. KiDispatchInterrupt which calls SwapContext directly uses the same approach as KiQuantumEnd, instead of storing the value at OldThread->WaitIrql it just moves it into ECX.
Post notes :
- Based on Windows 7 32 bit :>
- For any questions or suggestions feel free to leave a comment below or send me an email : [email protected]
Hello,
We (Spiderz) have finished 26th at the NCN CTF this year with 2200 points and we really did enjoy playing. I was able to solve both cannaBINoid (300p) and (inBINcible 400p) .I have actually found 2 solutions for inBINcible that I'll describe separately later in this write-up.
We were given an 32-bit ELF binary compiled from Golang (GO Programming Language).
The main function is "text" (also called main.main) and it is where interesting stuff happens. While digging through this routine the os_args array caught my attention, around address 0x08048DB3 it will access the memory location pointed by os_args+4 and compare its content to 2. This value is nothing but the number of command line arguments given to the executable (argc in C), so the binary is expecting a command line argument which is in fact the key.
By looking at the next lines , I saw an interesting check :
As it's the first time I encounter GOlang I though that it was better to use GDB alongside with IDA so I fired up my linux machine , put a breakpoint on 0x08048F11 , gave the binary a 4 bytes long command line argument (./inbincible abcd) and then I examined both ESI and EBP .
esi = 0x4
ebp = 0x10
You can easily notice tha abcd length is 4 and the right length that should be given is 16 , we can safely assume now that the flag length is 16 bytes.
Note :
The instruction which initializes the flag length to 0x10 is this one (examine instructions before it)
.text:08048D05 mov [ebx+4], edi
If the length check is true runtime_makechan function will be called (0x08049073) which creates a channel as its name implies. After that we'll enter immediately a loop that will get to initializing some structure fields then calling runtime_newproc for each character in the flag (16 in total). One of the variables is initialized with "main_func_001" and it can be seen as the handler that is called when chanrecv is called.
After breaking out of the loop, ECX is set to 1 and then we'll enter another loop (0x080490DD). This loop calls chanrecv for each character in the input (under certain circumstances). chanrecv is supplied the current index of the input and a pointer to a local variable which I named success_bool. Basically our main routine will supply a pointer to success_bool to the channel which will assign another thread (probably the one created using runtime_newproc) executing the main_func_001 to do some checks then write a TRUE or FALSE value into the variable. After returning from chanrecv the boolean will be checked. If it's TRUE ecx will keep its value ( 1 ) and we'll move to the next character. However if main_func_001 has set the boolean to false ecx will be zeroed and the other characters of the user input won't be checked (fail).
I have actually found 2 methods to approach this challenge (with bruteforcing and without bruteforcing) :
1 - Getting the flag using bruteforce :
This solution consists of automating the debugger (GDB) to supply a 16 bytes length string as an argument , the current character (we basically start with the first character) will be changed during each iteration using a charset and the next character will be left unchanged until we've found the right current character of the key and so on. To find the right character we must break after returning from chanrecv then read the local variable (boolean) value , if it's 1 then we've got the right character and we shall save it then move to the next one, else we'll keep looking until finding the right one.
Here's a python GDB script that explains it better :
flag : G0w1n!C0ngr4t5!!
2 - Getting the key by analyzing main_func_001 :
As main_func_001 is the one responsible for setting the boolean value, analyzing this routine will give us the possibility to get the flag without any bruteforcing. Let's see what it does : main_func_001 expects the boolean variable pointer and the index of the character to be tested. This index , as mentionned earlier, is the iterator of the loop which has called chanrecv.
For the purpose of checking each character main_func_001 uses 2 arrays , I called the first 5 bytes sized array Values_Array. The second array size is 16 bytes , same length as the password.
So here's how we can get the flag using the 2 arrays :
flag : G0w1n!C0ngr4t5!!
The final key to validate the challenge is NcN_sha1(G0w1n!C0ngr4t5!!)
Hi,
This time with a quick writeup . Well , I took some time to reverse the binary under IDA and I soon discovered that the vulnerability was a memory leak which leaks 16 bytes from the stack and the vulnerable function was cmd_lotto, here's the full exploit :
I'll publish a writeup for exploitation 400 ( saturn ) as soon as possible.
Download binary : Here
Follow me on Twitter : Here
You have stolen the checking program for the CSAW Challenge-Response-Authentication-Protocol system. Unfortunately you forgot to grab the challenge-response keygen algorithm (libchallengeresponse.so). Can you still manage to bypass the secure system and read the flag?
nc 54.85.89.65 8888
I grabbed the binary , threw it in IDA and then started looking at the main routine. The first function that was called in main was _fillChallengeResponse and it takes two arguments . I named them : fill_arg0 and fill_arg4.
A quick check reveals that this function is imported from an external library (the one we 'forgot' to grab). Also by checking the arguments passed to the function they appear to be pointers , each pointer points to a 32 bytes array in the bss section.We can also see that the first array is directly followed by the next one.
As fillChallengeResponse is given 2 pointers , we can safely guess that its mission is to fill them with the right data.
Let's carry on :
Next, we will enter this loop. Its was previously initialized to 0 and we'll quit the loop only if the iterator is strictly above 0. In this loop, we are first prompted to supply an input in which only the first byte is read , the byte is saved at [esp+1Bh] and the switch statement only uses the highest order nibble of the read byte.
If the switch statement was supplied 0xA0 , it will lead to retrieving the original read byte (0xA2 for example) and then call a function that will access the Array1 and print the dword at the index described by the lowest order nibble of the read byte multiplied by 4 ((0xA2 & 0xF)*4 = 8 for example).
If the switch statement was supplied 0xB0 , the executed block of code will retrieve the original read byte and then call a function that will wait for user input and then compare that input to the dword indexed by the lowest orded nibble of the original byte multiplied by 4 in Array2. If the 2 values are equal another 8 sized array of bytes will be accessed and 1 is written into the same index indicated by the lowest order nibble.
If the switch statement was supplied 0x80 , it will call a function that walk through the array of bytes checking if all the elements are equal to 1. If it's the case , the function will print the contents of "flag.txt".
The trick here is to take advantage of the read_array1 function , to make it print the Array2 and then pass each dword read from Array2 to the check_array2 function. As we already know Array1 and Array2 are sticked to each other and each ones size is 16 bytes this means that supplying 0xA8 will make us read the first dword of the Array2 . So all we need to do is supply 0xA8 as an input , save the printed value from read_array1 function , supply 0xE0 as an input (switch) then supply the saved printed value as a input (in check_array2) , this will result in setting the first byte of the 8 bytes sized array to 1. We have to basically repeat the same 8 times , 0xA8 -> 0xAF and 0xE0 -> 0xE8. When done , we'll supply 0x80 as an input and the "target" function will print the flag for us.
Here's an automated python script which prints the flag :
Hello,
I really enjoyed playing this CTF with Spiderz team and we ended at position 23.
This reversing challenge was for 250 points , and here's a brief write-up about it :
The binary expects a string as a command line argument and it starts in the beginning by decrypting a string stored statically at .data section. If the position of the character is an even number the character is xored by 0xD4, if it's an odd number the character is xored with 0xD5.
After decrypting , we get the following large equation : http://pastebin.com/1sU2B1fz
As you can see, each element a[x] is actually the character of position 'x' in the string that we'll supply. Similarly to the Satellite task we're deal with the boolean satisfiability problem .
If you take a second look at the long decrypted string we've got , you'll see that each character (with the exception of a[220] which not referenced anyway) of the string is referenced exactly 3 times and it is always tested against another character which is static in the 3 cases. So to solve this we'll just rely on studying each 2 characters couples alone.
For example to make this statement true :
(a[12] | a[20]) & ( ! a[12] | !a[20]) & (!a[12] | a[20])
a[12] must equal : 0
a [20] must equal : 1
Another example :
(!a[22] | a[150]) & (a[22] | a[150]) & (a[22] | !a[150])
In this case both a[22] and a[150] must be equal to 1 to make this statement true.
In the string shared in pastebin above you'll see that in some cases there's a double NOT (! !) , we'll just remove it as it doesn't change anything.
So to script this we don't basically need to study the SAT algorithm any longer, we can just separate this long string into 2 arrays. Each element of the 2 arrays is a logical equation (ex : "( ! a[22] | a[50] )" ).
The first array will only have the elements that have a NOT ('!') on the both chars or that doesn't have any NOTs in them (ex : ( a[55] | a[60] ) and this one ( ! a[70] | ! a[95] ) )
The other array will have all the equations that have a NOT preceding either one of the chars. (ex : ( ! a[22] | a[50] ).
The reason why I did this because in the case of the first example I gave (here it is :
(a[12] | a[20]) & ( ! a[12] | !a[20]) & (!a[12] | a[20]) ) there will be 2 occurrences of a[12] in the first array which makes it hard to decide whether it's equal to a 0 or 1 , here comes the 2nd array that I called "decide" that will decide by this equation : (!a[12] | a[20]) whether a[12] is 0 or 1 , which is 0 in this case.
So If only one instance of a given a[x] is found in the first array we can decide it's value directly , but if we have 2 instances we'll need to rely on the decide array.
Oh , I almost forgot , there's a character which isn't referenced in this string and which is a[220] . As the flag is generated based on our input, I tested the flag with this character set to 0 and 1. And it basically worked for 0.
Here's the script I wrote and described in this write-up (got us some bonus points though :D ) :
Hi,
It's been a while since I haven't shared anything concerning Windows internals and I'm back to talk in detail about how Windows thread suspension and resumption works. I'm going to discuss the mentioned topics in this blog post and incoming ones. Even though it can be discussed in one or two entries but I'm quite busy with studies.
As you might already know Windows uses APCs (Asynchronous Procedure Calls) to perform thread suspension. This may form an incomplete image of what's going on in detail as other tasks are being performed besides queuing the suspend APC. I will share throughout this article the details about what's happening and some pseudo code snippets of the reversed routines (Windows 7 32-bit SMP).
Let's say that a usermode thread 'A' wanted to suspend a second usermode thread 'B' , it has to simply call SuspendThread with a previously opened handle to the target thread. DWORD WINAPI SuspendThread(HANDLE hThread);
Upon the call we'll be taken to kernel32.dll then to kernelbase.dll which simply provides a supplementary argument to NtSuspendThread and calls it from ntdll.dll . NTSTATUS NtSuspendThread(HANDLE ThreadHandle,PULONG PreviousSuspendCount ); The thread's previous suspend count is basically copied from kernel to *PreviousSuspendCount. Ntdll then takes us to kernel land where we'll be executing NtSuspendThread.
- NtSuspendThread : If we came from usermode (CurrentThread->PreviousMode == UserMode), probing the PreviousSuspendCount pointer for write is crucial. Next, a pointer to the target thread object is obtained by calling ObReferenceObjectByHandle , if we succeed PsSuspendThread is called ; its return type is NTSTATUS and that is the status code returned to the caller (in PreviousMode) after calling ObDereferenceObject and storing the previous count value in the OUT (PreviousSuspendCount) argument if it's not NULL.
- PsSuspendThread : Prototype : NTSTATUS PsSuspendThread(PETHREAD Thread,PULONG PreviousSuspendCount) Here's a pseudo C manual decompilation of the routine code :
As you can see, PsSuspendThread starts with entering a critical region and then it tries to acquire run-down protection of the target thread to suspend , acquiring run-down protection for the thread guarantees that we can access and operate on the thread object safely without it being deleted. As you might already know a present thread object in memory doesn't mean that the thread isn't terminating or wasn't terminated simply because an object isn't deleted until all the references on that object are released (reference count reaches zero). The next check of the Terminated bit explains it , so if the thread is actually terminating or was terminated PsSuspendProcess return STATUS_THREAD_IS_TERMINATING. Let's suppose that our thread is up and running. KeSuspendThread will be called as a result and ,unlike the previous routines, will returns the previous count that we've previously spoken about. As we'll see later on KeSuspendThread raises a critical exception (by calling RtlRaiseStatus) if the thread suspend limit was exceeded (0x7F) that causes a BSOD if no exception handler is in place , so the kernel calls this function within a try-except statement. Upon returning from KeSuspendThread successfully , a recheck of the target thread is done to see if the thread was terminating while suspending , if that's true the thread is forced to resume right away by calling KeForceResumeThread (we'll see this routine in detail later when talking about thread resumption) and the previous suspend count is zeroed. Finallythe executing thread leaves the critical region and dereferences the PreviousSuspendCount pointer with the value returned from KeSuspendThread or 0 in the case where KeForceResumeThread was called.
That's all for this short entry , in the next parts about thread suspension I'll talk about KeSuspendThread , the suspend semaphore and the KiSuspendThread kernel APC routine.
Hi,
In the last blog post I talked about both NtSuspendThread and PsSuspendThread kernel routines. If you didn't check the first part I recommend to check it first : here
This part is dedicated to KeSuspendThread and KiSuspendThread routines (fun stuff).
Let's get started by looking a KeSuspendThread : (Windows 7 32-bit SMP as usual)
(pseudo-C) :
A quick overview of KeSuspendThread shows that it's actually the one responsible of calling KiInsertQueueApc in order to queue the target thread's suspend APC in its kernel APC queue. But that's not the only thing happening here , so take it slow and go step by step into what routine does.
As you can notice we start first by raising the irql to DISPATCH_LEVEL, this means we're running in the same irql where the thread dispatcher does so our thread is guaranteed to be running on this processor until the irql drops below DISPATCH_LEVEL. As I'm on a multiprocessor machine this doesn't protect from accessing shared objects safely as another thread executing on another processormight access the object simultaneously. That's why a couple of locks must be acquired in order to continue the execution of the routine , the first lock that KeSuspendThread tries to acquire is the APC queue lock (Thread->ApcQueueLock). After acquiring the lock, execution continues and the thread's previous suspend count is saved , then it is compared with the maximum value that a suspend count might reach (0x7F). The irql is lowered to it's old value and a fatal exception is raised with status (STATUS_SUSPEND_COUNT_EXCEEDED) if the SuspendCount is equal to that value. As I mentioned in the last part PsSuspendThread calls KeSuspendThread within a try-except statement so the machine won't bugcheck as a result of that exception.
If the target thread's suspend count is lower that 0x7F (general case), a second check is done against Thread->ApcQueuable bit to check whether APCs can be queued to that thread or no. Here I want to mention that if you patch that bit using windbg or a driver of a given thread object that thread becomes immune to suspending and even termination as it is done also using an APC.
If the bit is set (generally the case also), the target thread's suspend count is incremented. Next , the routine checks if the thread isn't suspended nor frozen.
If that's also true a third check is done :
line 29 : if(Thread->SuspendApc.Inserted == TRUE) { ....
The SuspendApc is a KAPC stucture , and the Inserted field is a boolean
that represents whether the APC was inserted in the APCs queue or not.
Let's start by seeing the else statement at line 38 first and get back to this check. So basically we'll be in the else statement if (SuspendApc.Inserted == FALSE) , it will simply set the APC's Inserted boolean to TRUE and then call KiInsertQueueApc to insert the suspend APC in the target's thread kernel APCs queue. KiInsertQueueApc is internally called by the exported KeInsertQueueApc.
The check at line 29 is confusing, since if the SuspendApc.Inserted is TRUE this already means that the suspend count is different than 0 so we won't even reach this if statement.As we'll see in a later article KeResumeThread is the routine that actually decrements the SuspendCount but it doesn't proceed to do so until it acquires the ApcQueue lock , so this eliminates the fact that KeResumeThread and KeSuspendThread are operating simultaneously on the same target thread (SMP machine). If this check turns out true for a reason , we acquire a lock to safely access and modify the SuspendSemaphore initialized previously by &Thread->SuspendSemaphore and then decrement the Semaphore Count to turn it into the non-signaled state apparently.
If the SuspendApc is now queued , its kernel and normal routines (KiSuspendNop and KiSuspendThread respectively) will be executed as soon as KiDeliverApc is called in the context of the target thread.
The SuspendApc is initialized in KeInitThread this way :
Let's now take a look at KiSuspendThread normal APC routine :
It simply calls KeWaitForSingleObject to make the thread wait for the SuspendSemaphore to be in the signaled state.
The Suspend semaphore is also initialized in KeInitThread routine :
As you can see the count limit is set to 2 and the initial semaphore is 0. As we'll see later when talking about thread resumption : each synchronization object has a header structure defined as : _DISPATCHER_HEADER, this structure contains the synchronization object's Type (mutant , thread , semaphore ...) , Lock , SignalState fields and some other flags.
The SignalState field in a semaphore is the same as the semaphore count and the semaphore count must not exceed the limit. Semaphores ,when in signaled state (semaphore count > 0) , satisfy the wait for semaphore count threads and unsignal the semaphore. Means if 4 threads are waiting on a semaphore and it became in a signaled state with a semaphore count of 2 , 2 threads will satisfy the wait and the semaphore will become non-signaled. The next waiting thread won't get a chance to run until one of the released threads releases the semaphore , resulting in its semaphore count being incremented (signaled state).
Let's get back to the SuspendSemaphore now. As I said earlier, it is initialized as non-signaled in the first place so when a thread is suspended it'll stay in the wait state until the semaphore becomes signaled. In fact KeResumeThread is the responsible routine for turning the semaphore into the signaled state and then calling KiSignalSynchronizationObject to unlink the wait block and signal the suspended thread (future posts).
As we discovered together what happens when suspending a thread in detail , the next blog posts will be dedicated to talking about what happens when we call ResumeThread or ZwResumeThread. Stay tuned.
Hello, in the two previous blog entries I discussed how thread suspension works. I'll dedicate this post to share my research concerning thread resumption, it was crucial to explore some parts of the internal synchronization mechanisms to achieve a better understanding. As usual, the reversing was done on a Windows 7 32-bit machine.
To resume a suspended thread you normally call ResumeThread from usermode or ZwResumeThread from kernelmode, as a result you'll be landing in the NtResumeThread kernel function, it's very similar to NtSuspendThread that I already talked about in the previous posts.
This is the function's prototype : NTSTATUS NtResumeThread(HANDLE ThreadHandle,PULONG PreviousSuspendCount)
It returns a status code and optionally a previous suspend count indicating the thread's suspend count before it was decremented, as you might already know suspending a thread x times requires resuming it x times to make it able to run again.
In order to start the thread resumption and to get the previous suspend count, NtResumeThread calls KeResumeThread which prototype is the following : LONG KeResumeThread(PKTHREAD Thread)
KeResumeThread returns the previous suspend thread count and resumes the thread if the suspend count reached 0. Let's look more closely at this function :
First the IRQL is raised to DISPATCH_LEVEL and the target thread's ApcQueueLock is acquired, after that the previous thread count is saved. If it isn't null, the thread was in fact suspended and the routine wasn't called just by mistake on a thread in a different state. The suspend count is then decremented and checked alongside the freeze count against 0. If both of them are null, the thread must be resumed and here where it gets interesting : A thread is suspended when executing an APC that just waits on the thread's Suspend Semaphore to switch into the signaled state. This Semaphore is initially in the non-signaled state and won't switch its state until the thread has to be resumed or was forced to be resumed (KeForceResumeThread).
Like any other synchronization object (mutex,thread,timer...) a semaphore has a header structure (_DISPATCH_HEADER). Its most important fields are the type, signal state, lock and the wait list head.
The WaitListHead field is the doubly linked list head of the wait blocks (KWAIT_BLOCK) waiting for the synchronization object. Let's dump KWAIT_BLOCK structure :
- The pointers to the next and previous wait block waiting on the same synchronization object are in the LIST_ENTRY WaitListEntry field. e.i : if there are threads waiting on a synchronization object, the dispatch header's WaitListHead field points to the first block's WaitListEntry field. The object fields of the wait blocks in this list is the same, but the thread field isn't.
- The NextWaitBlock field points to the next wait block when the wait is performed using KeWaitForMultipleObjects and each object field in this list points to a different synchronization object but the thread field is the same.
- The WaitKey field is the index of the wait block in the array used by KeWaitForMultipleEvents (either the default or the supplied array : see msdn). Its type is NTSTATUS and serves to know the index of the signaled object in case WaitAny was supplied. In KeWaitForSingleEvent this field is set to 0x00 (STATUS_SUCCESS/STATUS_WAIT_0).
- WaitType : WaitAll or WaitAny when waiting for multiple objects. WaitAny by default when waiting on a single object.
Back to KeResumeThread, if the signal state field value is greater than 0, then the synchronization object is in the signaled state and the wait could be satisfied for the thread(s) waiting on that object (depends on the object though). Compared to a mutex a semaphore is able to satisfy a wait for more than one single thread, a semaphore object has a Limit field in its structure indicating the limit of those threads. In addition, a semaphore has a semaphore count which is the SignalState field ; its value can't be above the Limit. Being in the signaled state, a semaphore will satisfy the wait for semaphore count threads.
KeResumeThread turns the semaphore into the signaled state by incrementing its count and then it calls KiSignalSynchronizationObject. Here's the routine :
The WaitListHead comes into scene in this function, where it is used to walk the doubly linked list of KWAIT_BLOCK structures waiting on the synchronization object. I forgot to mention earlier that the thread object structure KTHREAD stores 4 KWAIT_BLOCK structures in an array, more than one WaitBlock is clearly used when the thread is waiting on multiple objects , the msdn documentation on KeWaitForMultipleObjects discusses that point. The WaitBlock is mainly initialized inside KeWaitForSingleObject or KeWaitForMultipleObjects and then inserted in the tail of the KWAIT_BLOCK structures waiting list of the synchronization object.
You notice from the code above that WaitBlock->WaitType is checked, let's see the type definition of the WaitType field type.
- WaitAll means that the wait isn't satisfied for the waiting thread until all the synchronization object become in the signaled state (KeWaitForMultipleObjects). - WaitAny means that the wait is satisfied for the thread if at least one synchronization object turns into the signaled state.
Let's get back to where we stopped and treat each case alone. If the WaitType is WaitAny, an attempt to unwait the waiting thread is made by calling KiTryUnwaitThread (we'll looking into this function shortly). If the thread exited the wait state, then the synchronization object's signaled state field is decremented. If it reached 0 as a result, we stop iterating through the wait blocks linked list because the synchronization object would be in the non-signaled state.
Now let's see if the WaitType is equal to WaitAll ; In that case only a call to KiTryUnwaitThread is made.
The arguments given to KiTryUnwaitThread are quite different in the two cases. Here is the decompilation of parts that interest us of the function :
The function appears to call KiSignalThread , let's take a look at it too :
In general, KiTryUnwaitThread calls KiSignalThread if the thread is waiting and return a boolean value describing if the thread was signaled or not. In fact this boolean value is returned by KiSignalThread, this function unlinks the thread from the linked list of threads in the waiting state for the processor it was executing in before exiting the running state (WaitPrcb), then it inserts the thread into the deferred ready list and set its state to DeferredReady , after that it sets the Thread->WaitStatus to the same status code passed to KiTryUnwaitThread and then it returns TRUE. KiSignalThread does what I described previously if the Thread->WaitRegister.State == 1; KiCommitThreadWait initializes this field to 1. But if Thread->WaitRegister.State == 0 (this field is initialized to 0 by KeDelayExecutionThread), the WaitStatus is set to the status code and TRUE is returned.
The Thread->WaitStatus field is returned by KiSwapThread function which is called by KeWaitForSingleObject and KeWaitForMultipleObjects. KiSwapThread basically won't return to KiCommitThreadWait until the waiting thread exited the wait state (KiSignalThread). In our case, KiCommitThreadWait returns to KeWaitForXXXObject(s) with the WaitStatus as a return value. This WaitStatus describes the reason why the thread was awaken from its wait state. KeWaitForXXXObject(s) checks on this return value. Here's a very simplified pseudo code of what interests us:
Everything has become quite clear at this stage to explain why KiSignalSynchronizationObject supplies different arguments to KiTryUnwaitThread and also why it decrements the SignalState when the wait type is WaitAny. Let me explain :
When the wait type is WaitAny, this means that the waiting thread entered the wait state upon calling KeWaitForSingleObject or KeWaitForMultipleObject with the WaitAny wait type.Thus, KiTryUnwaitThread is called with the WaitBlock->WaitKey as the wait status. So when the awaken thread returns from KiCommitThreadWait in KeWaitForMultipleObjects the wait status won't be STATUS_KERNEL_APC and we'll bail out directly returning the index of the signaled synchronization object. In this case, the synchronization object signal state wasn't touched that's why it must be decremented after successfully unwaiting the thread.
Let's see now, if the wait type is WaitAll ; this implicates that the waiting thread waits for multiple objects to become in the signal state. That's why KiTryUnwaitThread is called with STATUS_KERNEL_APC so that KeWaitForMultipleObjects iterates again and checks the signaled state of all synchronization objects. If it turns out that they're all signaled KeWaitForMultipleObject takes care this time of decrementing or zeroing (depends on the object) the signal state of all the synchronization objects the thread was waiting on.
Let's continue the story of the suspended thread and see what happens when it's finally resumed. Now that the semaphore is signaled and therefore the thread is deferred ready thanks to KiSignalThread, it will be scheduled to run soon. When it does run it will return from KeWaitForSingleEvent with a STATUS_SUCCESS/STATUS_WAIT_0 (Status != STATUS_KERNEL_APC). We're now in the kernel APC routine after returning...
Conclusion :
While thread suspension relies on queuing a kernel APC calling WaitForSingleEvent on a suspend semaphore, thread resumption takes us more deeply into exploring synchronization objects and how the waiting threads behave differently when waiting on a single or multiple objects.
I hope you enjoyed reading this post.
Follow me on twitter : Here
Hi,
The binary is a c++ compiled code under MIPS architecture that takes the flag as a command line argument. It uses a c++ list to store the whole flag in binary form and a class called Wires to store 3 'bits' (words in fact) in 3 different fields. In order to access those field the class has 4 different functions, one to initialize the 3 fields, and others to retrieve the value of the each one of them.
A vector of type Wires is created in order to store the flag , e.i : the previously created list is converted to that vector. The difference is that each field of the vector stores 3 'bits' now and each new field is pushed onto the back of the vector.
After setting up the vector, the binary start to somehow shuffle (check script) the bits around using a recursive function that calls itself 8196 times. Finally, the result vector is converted to a string a compared to another string in memory :
"0001101001000111110001100001101011000110010110111100010011001010100110011...etc"
Here's a C script automating the process and printing the flag :
flag : myheadmateisafredkin!
binary download : here
See you again soon.
Follow me on twitter : here
Please submit the flag like RCTF{flag}
Binary download : here
The crackme is an MFC application :
We can locate the routine of interest by setting a breakpoint on GetWindowTextW. Keep in mind that the input is in Unicode.
Later on, we find that the program generates two distinct blocks of values. These are generated from hard-coded values independently from the user input, so they're always the same. We call the first one : static_block1 and the second static_block2.
Then, there's the call to the encrypt function which takes static_block1 as an argument.
The encrypted block will then be XORed with static_block2.
We also find a reference to the encrypted valid key here, which we can extract easily during runtime :
The loop above performs a double-word by double-word comparison of the encrypted user input with the encrypted valid key that already came with the crackme.
In order to solve the challenge we need to reverse engineer the encrypt function and do the exact reverse. We also don't have to forget the XOR that is done with static_block2. For that matter, we supply to the decryptfunction (the one we need to write) encrypted_valid_key XOR static_block2.
The script below has my implementation of the decrypt function, it outputs the key to flag.txt :
This blog post is about my personal attempt to superficially list VAD types under Windows 10. It all started when I was wondering, out of sheer curiosity, if there's any way to determine the VAD type (MMVAD_SHORT or MMVAD) other than by looking at the pool tag preceding the structure. In order to do that, I had to list all VAD types, do some reverse engineering, and then draw a table describing what I've been able to find. You can view the full document by clickinghere
From the table above it is possible to deduce the VAD structure type from both the VadType and PrivateMemory flags.
VadType flag
PrivateMemory flag
Type
0
0
MMVAD
0
1
MMVAD_SHORT
1
1
MMVAD
2
0
MMVAD
3
1
MMVAD_ENCLAVE
To test it out, I wrote a kernel driver that prints the deduced VAD type for each node of calc.exe. It also prints the pool tag so we can check the result.
And that's all for this article.
You can follow me on Twitter : here
Fibonacci - 100 pts + 6 bonus pts ( 45 solves ):
This binary is supposed to print the flag directly into the screen. However, it will take a very very long time to print the whole flag since the output is based on the calculation of fibonacci numbers recursively.
For each bit of the encoded flag (length = 33 stored at 00000000004007E0), the fibonacci number of that bit's position is calculated : this means that it will calculate fibonacci values for numbers from 0 to 263.
This is not all. Since the flag needs to be decoded, each call to the fibonacci sub-routine expects a pointer to a bit value which is XORed with a calculated bit from the resulting fibonacci number. Keep in mind that the fibonacci implementation is recursive, and thus we expects this boolean value to be XORed multiple times for greater numbers.
When the fibonacci sub-routine returns to the main function, the corresponding bit of the encrypted flag is XORed with the calculated bit value.
The solution that came in mind is to modify the fibonacci implementation so as to save both the calculated bit value and the resulting fibonacci number for a given number. So instead of recursing and re-calculating the fibonacci number of a previously calculated one (in a previous call for a previous bit of the flag), we simply load the result of the calculation and XOR the current output bit with the one we already saved.
The solution is implemented in the script below. All modifications done to the original function are commented.
Full script : here
We immediately get the flag when we run the program.
dont_panic - 100 pts + 15 bonus pts ( 19 solves ):
The file is a GO binary. After locating the main function, by stepping in the debugger, I found that the binary expects a command line argument of 42 characters.
For each character it calls a sub-routine sub_47B760 that returns a calculated byte corresponding to the one supplied. This byte is then compared to the one it corresponds to in a hardcoded array of bytes, which clearly represents the encrypted flag.
I didn't really look into how the values are calculated since GO binaries tend to be messy and I didn't really have to do it in order to solve the challenge. The thing is, the program branches to the block that displays the fail message ("Nope") as soon as it finds that one character is wrong. This opens room for brute-forcing since we can brute-force the flag character by character dynamically.
I used python with GDB to do so. Here's the solution script :
full script : here
After executing the binary it prints : "Input Key:" and waits for us to enter the flag. The routine printing the "Input Key:" message is executed at initialization alongside a sub-routine implementing the ptrace anti-debugging trick. Since we're going to debug the binary, I patched the anti-debugging sub-routine's address with nullsub_1.
After setting up remote debugging under IDA and supplying some random input to the binary we see a call to some code that was stored in executable memory.
IDA sometimes has trouble displaying memory under its debugger, so let's setup a manual memory region and set it as an executable 64-bit segment.
Now we should be able to view the entirety of the bytes copied to memory.
In the figure below, the code that is executed starts by checking if the 4th bit of input[0xC] is set. If it's not set, the message ":(" is printed and the process exits.
However, if the bit is set the code proceeds to decrypt the next block and also XOR the subsequent blocks that are still encrypted. (see figure below)
There's also a second test, implemented in some blocks, which involves the NOT instruction (figure below). This means that the 3rd bit of input[0x11] must not be set.
The amount of code executed is huge and doing this manually is impossible. So, we have two options :
1. Either dump the encrypted data, decrypt it statically and then build the flag by automatically reading the disassembly.
2. Automate the IDA debugger to save the index plus the bits that must be set and guarantee that everything will be executed by continually patching ECX in order not to take the JECXZ jump.
Even if the 2nd attempt would take longer to complete, I chose to implement it. If I ever do the first one, I'll be sharing it here too :)
So, what the script below does is create a dictionary where the key is the character's position and the value is an array of bits that must be set. I simply ignore the NOT case, since we only care about the bits that must be set.
For example if the character at index 2 needs to have bits : 0, 4 and 7 set, the dictionary entry would look like this : {2: [1, 16, 80]}
After the process terminates, we proceed to OR the numbers of each array which gives us the flag in the end.
Here's the script that must be executed under IDA to get the flag.
In this blog post, I’ll be describing
two bugs I found inside the MalwareFox AntiMalware drivers (zam32.sys/zam64.sys)
that allow a non-privileged process to “authenticate” itself with the driver and issue special IOCTLs leading to privilege
escalation.
This process of registration or authentication is used by the driver to know
which processes to trust when receiving a device control request.Normally, these processes should be the
antimalware’s own processes.
A process that is authenticated by the driver can send special IOCTLs
that cannot be sent by other non-authenticated processes. These special IOCTLs can be used to:
-Enable/Disable real-time protection
-Read/Write to raw disk
-Create full access user-mode process handles
-…etc
Registered processes are stored in an array located in the data section
of the driver. In zam64.sys, each element of the array has 0x980 bytes and the
maximum number of elements is 100. An element contains information on the process
such as its PID, its session id and the name of the image file name from the
EPROCESS structure.
During the run-time of the anti-virus only a single process is
registered with the driver, and that is MalwareFox’s own process ZAM.exe, which runs within session
1. There’s also a ZAM.exe process running as
a Windows service but it doesn’t seem to be
registered.
Figure 1 – MalwareFox’s entry in the
registration array
So, by registering our process with the driver, we enable the god-mode
capability to send special IOCTLs and basically make use of them to escalate privileges
on the system.
I have found two ways to do so.
CVE-2018-6593: Register the process
by connecting to the mini-filter communication port:
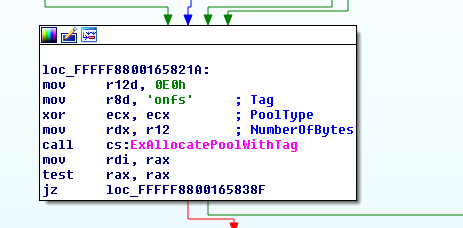
As shown in the figure below, a default security descriptor is built for
the mini-filter communication port allowing access only to SYSTEM and the
administrators. But right after that, RtlSetDaclSecurityDescriptor
is called with a NULL DACL pointer. This leads to the DACL pointer, that was
setup by FltBuildDefaultSecurityDescriptor,
being overwritten with NULL. As a result, everyone has access to the object.
In addition, the maximum number of connections allowed to the port are
100 even though only a single connection appears to be needed by the
Antimalware.
Figure 2
And here’s what it looks like under Windbg.
Figure 3
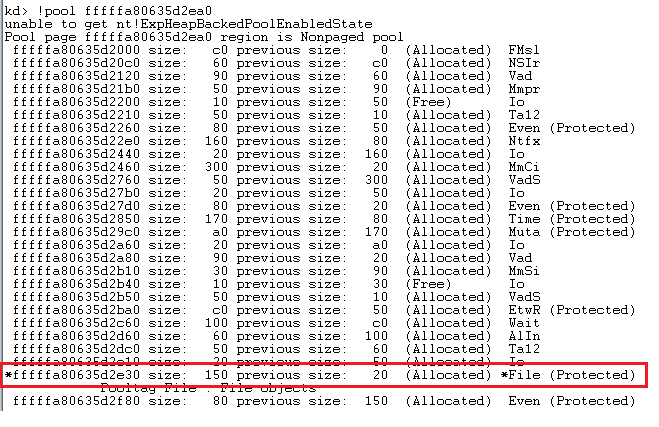
The interesting thing here is that when a process connects to the port,
the driver automatically registers it as a trusted process in the array we saw
above. The figure below displays the first and second entries in the array when our process (exploit.exe) is connected to the port.
Figure 4
Our process is now registered and can send special IOCTLs as it pleases.
It turns out, the developers zeroed to DACL pointer of the port’s security descriptor because their own process (ZAM.exe) doesn’t run with administrator privileges and turns at medium IL. This of
course isn’t an excuse to disable all access
checks and from everything we saw until now this is probably an anti-virus you
don’t want on your machine; and this is not all!
CVE-2018-6606: Registering the process
by sending IOCTL 0x80002010
It turns out there’s a straightforward
way to register a process as trusted. Send IOCTL 0x80002010 with a process id
of your choice and voilà the process with
the PID you supplied is now registered and fully trusted by the driver!!!
What the driver fails to do here is check if the requestor process itself
is a registered process. It does check for this when a process sends a special
IOCTL, but it fails to do so if the process wants to register another process
as trusted; rendering all other checks useless.
Thus, all we need to do to register our process is send IOCTL 0x80002010
with our process’s PID.
Figure 5
We can now send any special IOCTLs we want, and we’ll be using IOCTL 0x8000204C to elevate privileges.
Getting SYSTEM
MalwareFox seems to need user-mode full access handles to processes. And
since we saw how its usermode process lacks the necessary privileges, it delegates this task of opening handles to its driver.
IOCTL 0x8000204C is a special IOCTL that must be sent by a registered
process to the driver. The requestor simply provides a PID as an input and gets
a full access handle as an output from kernel-mode; how cool is that for us ?
We use this opportunity to open a full access handle to winlogon.exe,
inject a cmd.exe shellcode and then create a remote thread.
Figure 6
CVE-2018-6593:
CVE-2018-6606:
A video demonstrating the first bug
(CVE-2018-6593):
In this challenge we're given an x64 ELF binary. The program acts as a userspace host for KVM virtualization. Among other things, it sets up the VM's address space, initializes the necessary VM registers, copies the code from the ".payload" section to it, then finally runs it.
Additionally, the userspace host expects the VM to trap when executing the three illegal instructions : IN, OUT, and HLT as shown below. The host will do some processing and then fix the VM's state so it can graciously continue executing.
And here is an instance of a HLT instruction within the VM's code.
Let's now describe the behavior of the host for each illegal instruction.
IN (port 0xE9) : Reads a single character from STDIN and returns it to the VM (The first thing that the VM does is read user input from STDIN).
OUT (port 0xE9) : Outputs a single character to STDOUT.
HLT : Before the VM executes a HLT instruction, it moves a special value into EAX. After it traps, our host reads this value and uses it as a key in an array. Each key corresponds to a handler routine within the VM's address space.
What the host does then is set VM's RIP register to the corresponding handler.
And by examining the handlers, we see that they invoke each other using the HLT instruction.
Now, let's try to examine what the VM does and figure out what these handlers are used for.
Briefly, 0x2800 bytes are read from STDIN and for each of these bytes sub_1E0 is called. The first time it's called, this function takes the user-supplied character and the address 0x1300 which points to some data.
sub_1E0 initializes local variables and then branches to the handler at 0x32c.
This one examines the dereferenced value, if it is 0xFF it branches to the handler at 0x347, if not it branches to a handler that compares the dereferenced value with the user-supplied character.
Now, examining the handler at 0x347 and the handlers it invokes (see the screenshot below : renamed sub_1E0 to traverse_tree), we see that the address 0x1300 is a root node of a binary tree.
In the tree at 0x1300, parent nodes have 0xFF as a value and contain two pointers for the left & right children. A leaf node, contains an ASCII character as a value which we suspect constitutes our flag. Recall that when a leaf is encountered a comparison is made with the user-supplied character and a boolean value is returned (RET instruction).
In the screenshot below, we see that the tree is recursively traversed and when a leaf is encountered and the comparison is successful sub_172 is called as we return from the functions recursively called.
When we traverse a left node, sub_172 is called with 0 whereas when we traverse a right node 1 is passed.
What this function does is build an array of bits starting at 0x1320 in the following manner :
BYTE* bits = 0x1320; BYTE count = 0;
void sub_172( BYTE bit ) { *bits |= bit << count++; if ( count == 8 ) { count = 0; bits++; } } This way, the bit array will represent the path traversed from the leaves to the root for all characters.
When this is done for all input characters, the resulting bit array is compared against the bit array for the correct input at 0x580. So, what we have to do is this :
Extract the correct bit array from 0x580 as bytes.
Reverse the order of the bytes and then convert them to binary representation. We reverse the order because we want to traverse the tree from root to leaf, doing the opposite would be impossible since all bits are concatenated. Also, when doing this, we'll start by extracting the last character and so on until we reach the first.
Below is the IDA Python script that you should run on the extracted ".payload" section to get the flag :
As a result, we get the flag and we see that the VM was expecting a tar file as input:
flag.txt0000664000175000017500000000007113346340766011602 0ustar toshitoshiflag{who would win? 100 ctf teams or 1 obfuscat3d boi?}
Thank you for reading :)
You can follow me on Twitter : here
Flare-on was a blast this year ! All challenges were great but I enjoyed solving the last one the most, although it was somewhat frustrating.
Due to my tight schedule, I won't go over all the details involved in solving the challenge. But I'll do my best to paint a complete picture of what's going on and how I approached the problem.
We start we a floppy disk image that you can download from here (PW : infected) :
When we boot the floppy using bochs, we see that it automatically executes infohelp.exe that asks us for a password.
Entering an arbitrary password, the message "Welcome to FLARE..." prints slowly on the screen and the password checks are performed.
What I did after this, is I mounted the floppy on my Ubuntu virtual machine and extracted the files in bold.
Both key.dat and message.dat contain nothing interesting. However, TMP.DAT appeared to contain the welcome message we see after typing the password and some funny strings like : "NICK RULES" and "BE SURE TO DRINK YOUR OVALTINE".
What I did next is I threw infohelp.exe into IDA to examine its behavior. To my surprise, I found that it does nothing but writes the supplied password to key.dat and then reads the contents of message.dat and prints them to the screen.
Here I thought that there should be some hooks involved that redirect execution to somewhere else when message.dat is opened or read. To confirm my suspicions, I executed the "type" command on message.dat; Lo and behold, the password check is performed.
Next, I opened TMP.DAT in IDA and found that it contains some code that seems to be our hook. So I attached IDA to bochs and started debugging.
To locate the hook within memory, I took advantage of the fact that the message is printed in a slow fashion so what I did is pause execution while stuff was still printing. I found myself in a loop implementing the subleq VM.
The caller supplies a pointer to the bytecode, its size, and the offset to the instruction where execution should start.
Each instruction is 6 bytes and has the following format :
struct inst {
WORD src_index;
WORD dest_index;
WORD branch_index;
};
The type of the subleq bytecode array is WORD*, so the VM views that its instruction size is 3 while it is 6 actually. This realization comes in handy when building an IDA processor module for the subleq.
As I did with last year's binary, I re-implemented the subleq VM with C to output each executed instruction to a file. However, I had an impossible-to-analyze file with over 1 GB. So what I did, is only print the subleq for the instructions that perform the password checks; That way I had a 30 MB-ish file that I could examine looking for patterns.
The way I had the emulated instructions printed was the following :
IP : sub [dest_index], [src_index] ; subtraction = result
The only thing that was visible on the fly is that the subleq starts by doing some initialization in the beginning and then enters a loop that keeps executing until the end. Here where suspicions of a second VM started to arise in my mind (OMG !).
I tried to locate the password characters inside the subleq and tried to figure out what operations were done on them but it was not clear at all.
I also did some text diffing between iterations and saw that the code was modifying itself. In these instances, the self-modification was done in order to dereference VM pointers and use their values as indexes in subsequent operations.
So, what I decided to do here is write a very minimal processor module that would allow me to view the subleq in a neat graph.
The file I extracted contains bytecode starting from IP : 0x5. So here's how you load it into IDA :
- Choose the subleq bytecode processor module and make sure to disable auto-analysis. It ruins everything when enabled.
- Change the ROM start address to 0xA and the input file loading address to the same : 0x5 * sizeof(WORD) == 0xA.
The bytecode will be loaded without being analyzed.
- Press 'P' at 0xA to convert into code and automatically into a function. You should have a beautiful graph as a result.
Well, it is not quite as beautiful as you might think, since we still have to deal with self-modifying code (knowing what exactly is modified) and also understanding the code as a whole.
It is quite hard to understand what subleq does by only reading "subleq" instructions, so the next thing that came to mind is to convert the subleq to MOV and ADD instructions without wasting too much time.
IDAPYTHON TO THE RESCUE !
I wrote a minimal script that looks for ADD and MOV patterns in the subleq and comments these instructions. First of all, the script intentionally skips the instructions that will be self-modified and doesn't comment the SUB since it's already there.
And the result was this :
More understandable ... still, not so much.
So what I did next is decompile this manually into C and then simplify the code.
So it is indeed another VM interpreted by the subleq. The nature of the VM was unknown to me until later when someone told me that it was RSSB. But I was able, however, to solve the challenge without needing that information.
Now, this RSSB VM executes bytecode that starts at offset 0xFEC from the start of the subleq or at offset 0x1250 of the TMP.DAT file.
If you dumped the bytecode from memory as I did, you'd find that the password you typed was written inside the RSSB VM at offset 0x21C (circled in red).
So far so good. I copied the whole RSSB bytecode and added it as an array and modified the C emulator code to print the "sub" instructions while executing the VM; the same way I did with the subleq.
The result looked like this :
IP : p[dest_index], ACCUM ; operation
Reading the code, I found out that a sum is calculated for the characters in the password. In addition to that, the number of characters in the password must be 64. I knew that by examining a variable that gets decremented from 64 at each iteration of the sum calculation.
For information, the sum is stored at : p[0b47].
So I patched the memory to store a 64 byte string and then I looked up where the first character of the input was read apart from where the sum was calculated. I performed a search for [010e] ( 0x21C / 2 == 0x010E).
65 in dec == 0x41 in hex
Long story short, the algorithm works in a loop, in each iteration two characters of the password are used to calculate a value. The sum of all characters is then added to that value as shown in the figure below (sum : in red, value : in green).
A few instructions later, a hardcoded value at [0a79] is subtracted from the resulting value of the previous operation.
We can see that the resulting value of the next two characters for example is compared against the next hardcoded value at [0a7a] and so on until the 30th character.
So, we have a password of 64 bytes but from which only the first 30 bytes are checked !
Let's leave that aside for now and ask : what makes a check correct ? Maybe the result of the subtraction must be zero ?
I quickly added a check onto my C emulator that did the following :
res = ptr[op_addr] - ptr[1];
if ( ptr[0] == 0x203d ) //IP of the check, see figure above { res = 0; }
This will simply patch the result to zero in the check at 0x203d. I ran the program and it showed that the password was correct, so I knew I was on the right path.
I also observed (based on a single test case) that in each iteration the calculated value depends on the position of the two characters. So even if we have the same two characters at different places the calculated value will be different.
Solution : Here I am going to describe how I solved the challenge during the CTF. Surely this is not the best solution out there, but I'd like to show my line of thought and how I came to solve this level.
We know that the same sum is used in all the operations, and that there can be only one sum (or a handful as we'll get to see later) that will satisfy all the checks.
We can run a bruteforce attack where we let the VM calculate the value for two given characters (by patching the characters at run-time) then run the check on all possible sums (by patching the sum at run-time too). The first check will give us a lot of sums that we'll use to bruteforce the second check. In its turn, this check will filter out invalid sums that we'll eliminate from the third check and so on until we do all 15 of them. (30 characters / 2 characters per check == 15 checks).
At the end, we'll get the valid sums from which we can easily deduce the characters that generated them in each check.
The problem I had with this approach was performance. For each combination of two characters, and for each sum, I was running the VM all over again which, if I left like that, would take a huge amount of time : printing the welcome message, calculating the sum for junk characters ... over and over again each time !
What I ended up doing is "snapshotting" the VM in multiple states.
Snapshot 1 : Where the first character of the two is read (depending on the iteration we're in).
Snapshot 2 : For each two characters, take a snapshot after the value that depends on both of them is calculated and right at the address where the sum is read and added to the calculated value (IP == 0x1ff7).
The optimization here is that we execute what we only need to execute and nothing more. We patch the two characters by the ones we're currently bruteforcing at Snapshot 1 and then after the value is calculated for those two we take Snapshot 2 and we only get to patch the sum. When each iteration is over, we re-initialize the snapshots to their original states.
Here's the overall algorithm involved in pseudo-code (this is not C nor anything close) :
sums [xxx] = {...};
new_sums [yyy] = {0};
for ( i = 0; i < 15; i++)
{
memcpy(initial_state_tmp, initial_state);
snapshot_1 = take_snapshot_1(initial_state_tmp, i); //i is passed to go to the corresponding check
//Execute the subtraction check and return a boolean if ( execute_check(snapshot_2_tmp) )
{
append(new_sums, sum); //valid sum, append it
}
}
}
}
sums = new_sums;
new_sums = [0];
}
print sums;
At the end we'll get the valid sums that resulted in the check being equal to 0.
Here's the full C script implementing this (a bit messy) :
After the 15 checks are done, the script gives us files containing the valid sums that passed each of the checks. We're only interested in the last file (4KB in size) highlighted below :
Contents of array_14
I actually forgot to include the characters that generated the sum for each check. And I had to do it separately.
This requires some modifications of the code above : we initialize the sums array with the contents of array_14 and for each sum bruteforce the two characters that pass each check. To optimize, I listed the first four characters (two first checks) for each one of these sums.
And one of them was particularly interesting. The sum 0xd15e resulted in these four characters "Av0c".
Running the same script for this single sum while bruteforcing all of the characters gives us the flag :
Flag : [email protected] Well in the end, this one really deserved being the 12th, it was time consuming, frustrating and above all FUN ! Thanks for bearing with me and until another time guys - take care :)
More than a year ago, I developed a local privilege escalation exploit for a product (that I cannot disclose unfortunately) in which I had to bypass ASLR.
For the record, these are the protections enabled in the targeted service's binary, it is a 32-bit executable running under Wow64 on 64-bit systems.
Basically, I was able to communicate through IPC with the system service and tell it to execute a function in its address space by pointer (it's a bit more tricky than this but you get the point). Actually, this would have been impossible if CFG was enabled.
Within the main module, I have located a function that invokes "system()" with an argument that I control. At this point, it was just a matter of bypassing ASLR in order to get that function's address and elevate privileges on the machine. However, I couldn't trigger any leaks through the IPC channel to get or deduce the main module's base.
But as luck would have it, the service exposed some other functionalities through IPC and one of them was the ability to call VirtualProtectEx and letting us supply a PID, the address, the size, and the new protection. The service was also kind enough to return the old protection of the region to our process via IPC.
Bypassing ASLR should be obvious by now knowing these two crucial points :
The function that we want to invoke resides in the main module.
On Windows the main executable's module of a process is the first module, with the lowest address in the user address space.
It is now only a matter of writing code to communicate with the service and to brute-force the location of the main module; we do that by looking for the first executable page in the address space and then calculating the main module's base : generally by subtracting 0x1000 from that page since the .text section is the first section.
The pseudo-code below shows an example of how this was done :
Launching a new process with SYSTEM privileges was easy at this point.
Yesterday I've read Microsoft's blog post about the new ATP kernel sensors added to log injection of user-mode APCs. That got me curious and I went to examine the changes in KeInsertQueueApc.
The instrumentation code invokes the function EtwTiLogQueueApcThread to log the event. The function's prototype looks like this :
EtwTiLogQueueApcThread is only called when the queued APC is a user-mode APC and if KeInsertQueueApc successfully inserted the APC into the queue (Thread->ApcQueueable && !Apc->Inserted).
EtwTiLogQueueApcThread first checks whether the user-mode APC has been queued to a remote process or not and only logs the event in the former case.
It also distinguishes between remotely queued APCs from user-mode (NtQueueApcThread(Ex)) and those queued from kernel-mode; The former is used to detect user-mode injection techniques like this one.
As shown below, two event descriptors exist and the one to log is determined using the current thread's previous mode to know whether the APC was queued by a user process or by a kernel driver.
(Click to zoom)
Looking at where the event provider registration handle EtwThreatIntProvRegHandle is referenced, we see that not only remote user-mode APC injection is logged but also a bunch of events that are commonly used by threats.
(Click to zoom)
Thanks for reading and until another time :)
Follow me on Twitter : here
In this blogpost, I will share a simple technique to circumvent the check that was introduced in Windows 10 build 1809 to detect user-mode APC injection. This technique will only allow us to "bypass" the sensor when we're running code from kernel-mode, i.e., queuing a user-mode APC to a remote thread from user-mode will still be logged. For more information about this new feature, please check out my previous blogpost.
In short, the sensor will log any user-mode APCs queued to a remote thread, be it from user-mode or kernel-mode. The most important check is implemented in the kernel function : EtwTiLogQueueApcThread as shown below.
(Click to zoom)
So queuing a user-mode APC to a thread in a process other than ours is considered suspicious and will be logged. However, when having code execution in kernel-mode we can queue a kernel-mode APC that will run in the context of the target process and from there we can queue a user-mode APC. This way, the check when KeInsertQueueApc is called from the kernel-mode APC will always yield (UserApc->Thread->Process == CurrentThread->Process).
The driver registers a CreateThreadNotifyRoutine in its DriverEntry.
CreateThreadNotifyRoutine queues a kernel-mode APC to a newly created thread.
The kernel-mode APC is delivered as soon as the IRQL drops below APC_LEVEL in the target thread in which we allocate executable memory in user-space, copy the shellcode, then queue the user-mode APC.
The user-mode APC is delivered in user-mode.
The only issue here is that Windows Defender's ATP will still log the allocation of executable memory thanks to another sensor.
Thanks for your time :)
Follow me on Twitter : here
This blogpost is about a vulnerability that I found in Panda Antivirus that leads to privilege escalation from an unprivileged account to SYSTEM.
The affected products are : Versions < 18.07.03 of Panda Dome,
Panda Internet Security, Panda Antivirus Pro, Panda Global Protection,
Panda Gold Protection, and old versions of Panda Antivirus >= 15.0.4.
The vulnerability was fixed in the latest version : 18.07.03
The Vulnerability:
The vulnerable system service is AgentSvc.exe. This service creates a global section object and a corresponding global event that is signaled whenever a process that writes to the shared memory wants the data to be processed by the service. The vulnerability lies in the weak permissions that are affected to both these objects allowing "Everyone" including unprivileged users to manipulate the shared memory and the event.
(Click to zoom)
(Click to zoom)
Reverse Engineering and Exploitation :
The service creates a thread that waits indefinitely on the memory change event and parses the contents of the memory when the event is signaled. We'll briefly describe what the service expects the contents of the memory to be and how they're interpreted.
When the second word from the start of the shared memory isn't zero, a call is made to the function shown below with a pointer to the address of the head of a list.
(Click to zoom)
The structure of a list element looks like this, we'll see what that string should be representing shortly :
typedef struct StdList_Event { struct StdList_Event* Next; struct StdList_Event* Previous; struct c_string { union { char* pStr; char str[16]; }; unsigned int Length; unsigned int InStructureStringMaxLen; } DipsatcherEventString; //.. };
As shown below, the code expects a unicode string at offset 2 of the shared memory. It instantiates a "wstring" object with the string and converts the string to ANSI in a "string" object. Moreover, a string is initialized on line 50 with "3sa342ZvSfB68aEq" and passed to the function "DecodeAndDecryptData" along with the attacker's controlled ANSI string and a pointer to an output string object.
(Click to zoom)
The function simply decodes the string from base64 and decrypts the result using RC2 with the key "3sa342ZvSfB68aEq". So whatever we supply in the shared memory must be RC2 encrypted and then base64 encoded.
(Click to zoom)
When returning from the above function, the decoded data is converted to a "wstring" (indicating the nature of the decrypted data). The do-while loop extracts the sub-strings delimited by '|' and inserts each one of them in the list that was passed in the arguments.
(Click to zoom)
When returning from this function, we're back at the thread's main function (code below) where the list is traversed and the strings are passed to the method InsertEvent of the CDispatcher class present in Dispatcher.dll. We'll see in a second what an event stands for in this context.
(Click to zoom)
In Dispatcher.dll we examine the CDispatcher::InsertEvent method and see that it inserts the event string in a CQueue queue.
(Click to zoom)
The queue elements are processed in the CDispatcher::Run method running in a separate thread as shown in the disassembly below.
(Click to zoom)
The CRegisterPlugin::ProcessEvent method does parsing of the attacker controlled string; Looking at the debug error messages, we find that we're dealing with an open-source JSON parser : https://github.com/udp/json-parser
(Click to zoom)
Now that we know what the service expects us to send it as data, we need to know the JSON properties that we should supply.
The method CDispatcher::Initialize calls an interesting method CRegisterPlugins::LoadAllPlugins that reads the path where Panda is installed from the registry then accesses the "Plugins" folder and loads all the DLLs there.
A DLL that caught my attention immediately was Plugin_Commands.dll and it appears that it executes command-line commands.
(Click to zoom)
Since these DLLs have debugging error messages, they make locating methods pretty easy. It only takes a few seconds to find the Run method shown below in Plugin_Commands.dll.
(Click to zoom)
In this function we find the queried JSON properties from the input :
(Click to zoom)
It also didn't hurt to intercept some of these JSON messages from the kernel debugger (it took me a few minutes to intercept a command-line execute event).
(Click to zoom)
The ExeName field is present as we saw in the disassembly, an URL, and two md5 hashes. By then, I was wondering if it was possible to execute something from disk and what properties were mandatory and which were optional.
Tracking the SourcePath property in the Run method's disassembly we find a function that parses the value of this property and determines whether it points to an URL or to a file on disk. So it seems that it is possible to execute a file from disk by using the file:// URI.
(Click to zoom)
Looking for the mandatory properties, we find that we must supply at minimum these two : ExeName and SourcePath (as shown below).
Fails (JZ fail) if the property ExeName is absent
Fails if the property SourcePath is absent
However when we queue a "CmdLineExecute" event with only these two fields set, our process isn't created. While debugging this, I found that the "ExeMD5" property is also mandatory and it should contain a valid MD5 hash of the executable to run.
The function CheckMD5Match dynamically calculates the file hash and compares it to the one we supply in the JSON property.
(Click to zoom)
And if successful the execution flow takes as to "CreateProcessW".
(Click to zoom)
Testing with the following JSON (RC2 + Base64 encoded) we see that we successfully executed cmd.exe as SYSTEM :
The final exploit drops a file from the resource section to disk, calculates the MD5 hash of cmd.exe present on the machine, builds the JSON, encrypts then encodes it, and finally writes the result to the shared memory prior to signaling the event.
Also note that the exploit works without recompiling on all the products affected under all supported Windows versions.
Hello,
In this blogpost I'm going to share an analysis of a recent finding in yet another Antivirus, this time in Comodo AV. After reading this awesome research by Tenable, I decided to give it a look myself and play a bit with the sandbox.
I ended up finding a vulnerability by accident in the kernel-mode part of the sandbox implemented in the minifilter driver cmdguard.sys. Although the impact is just a BSOD (Blue Screen of Death), I have found the vulnerability quite interesting and worthy of a write-up.
Comodo's sandbox filters file I/O allowing contained processes to read from the volume normally but redirects all writes to '\VTRoot\HarddiskVolume#\' located at the root of the volume on which Windows is installed.
For each file or directory opened (IRP_MJ_CREATE) by a contained process, the preoperation callback allocates an internal structure where multiple fields are initialized.
The callbacks for the minifilter's data queue, a cancel-safe IRP queue, are initialized at offset 0x140 of the structure as the disassembly below shows. In addition, the queue list head is initialized at offset 0x1C0, and the first QWORD of the same struct is set to 0xB5C0B5C0B5C0B5C.
(Figure 1)
Next, a stream handle context is set for the file object and a pointer to the previously discussed internal structure is stored at offset 0x28 of the context.
Keep in mind that a stream handle context is unique per file object (user-mode handle).
(Figure 2)
The only minifilter callback which queues IRPs to the data queue is present in the IRP_MJ_DIRECTORY_CONTROL preoperation callback for the minor function IRP_MN_NOTIFY_CHANGE_DIRECTORY.
Before the IRP_MJ_DIRECTORY_CONTROL checks the minor function, it first verifies whether a stream handle context is available and whether a data queue is already present within. It checks if the pointer at offset 0x28 is valid and whether the magic value 0xB5C0B5C0B5C0B5C is present.
(Figure 3) : Click to Zoom
Before the call to FltCbdqInsertIo, the stream handle context is retrieved and a non-paged pool allocation of size 0xE0 is made of which the pointer is stored in RDI as shown below.
(Figure 4)
Later on, this structure is stored inside the FilterContext array of the FLT_CALLBACK_DATA structure for this request and is passed as a context to the insert routine.
(Figure 5)
FltCbdqInsertIo will eventually call the InsertIoCallback (seen initialized on Figure 1). Examining this routine we see that it queues the callback data structure to the data queue and then invokes FltQueueDeferredIoWorkItem to insert a work item that will be dispatched in a system thread later on.
As you can see from the disassembly below, the work item's dispatch routine (DeferredWorkItemRoutine) receives the newly allocated non-paged memory (Figure 4) as a context.
(Figure 6) : Click To Zoom
Here is a quick recap of what we saw until now :
For every file/directory open, a data queue is initialized and stored at offset 0x140 of an internal structure.
A context is allocated in which a pointer to the previous structure is stored at offset 0x28. This context is set as a stream handle context.
IRP_MJ_DIRECTORY_CONTROL checks if the minor function is IRP_MN_NOTIFY_CHANGE_DIRECTORY.
If that's the case, a non-paged pool allocation of size 0xE0 is made and initialized.
The allocation is stored inside the FLT_CALLBACK_DATA and is passed to FltCbdqInsertIo as a context.
FltCbdqInsertIo ends up calling the insert callback (InsertIoCallback) with the non-paged pool allocation as a context.
The insert callback inserts the request into the queue, queues a deferred work item with the same allocation as a context.
It is very simple for a sandboxed user-mode process to make the minifilter take this code path, it only needs to call the API FindFirstChangeNotificationA on an arbitrary directory.
Let's carry on.
So, the work item's context (non-paged pool allocation made by IRP_MJ_DIRECTORY_CONTROL for the directory change notification request) must be freed somewhere, right ? This is accomplished by IRP_MJ_CLEANUP 's preoperation routine.
As you might already know, IRP_MJ_CLEANUP is sent when the last handle of a file object is closed, so the callback must perform the janitor's work at this stage.
In this instance, The stream handle context is retrieved similarly to what we saw earlier. Next, the queue is disabled so no new requests are queued, and then the queue cleanup is done by "DoCleanup".
(Figure 8)
As shown below this sub-routine dequeues the pended requests from the data queue, retrieves the saved context structure in FLT_CALLBACK_DATA, completes the operation, and then goes on to free the context.
(Figure 9)
We can trigger what we've seen until now from a contained process by :
Calling FindFirstChangeNotificationA on an arbitrary directory e.g. "C:\" : Sends IRP_MJ_DIRECTORY_CONTROL and causes the delayed work item to be queued.
Closing the handle : Sends IRP_MJ_CLEANUP.
What can go wrong here ? The answer to that is freeing the context before the delayed work item is dispatched which would eventually receive a freed context and use it (use-after-free).
In other words, we have to make the minifilter receive an IRP_MJ_CLEANUP request before the delayed work item queued in IRP_MJ_DIRECTORY_CONTROL is dispatched for execution.
When trying to reproduce the vulnerability with a single thread, I noticed that the work item is always dispatched before IRP_MJ_CLEANUP is received. This makes sense in my opinion since the work item queue doesn't contain many items and dispatching a work item would take less time than all the work the subsequent call to CloseHandle does.
So the idea here was to create multiple threads that infinitely call : CloseHandle(FindFirstChangeNotificationA(..)) to saturate the work item queue as much as possible and delay the dispatching of work items until the contexts are freed. A crash occurs once a work item accesses a freed context's pool allocation that was corrupted by some new allocation.
Below is the proof of concept to reproduce the vulnerability :
And here is a small Windbg trace to see what happens in practice (inside parentheses is the address of the context) :


.jpg)